0%
基于模型的控制方法
建模(Modeling)
- 建模一般可以分为分析建模和拟合建模
- 通常,一个模型主要由各种属性表示,主要包括描述输入输出的数量、模型是线性还是非线性、连续还是离散等特性
- 控制模块中的模型,通常包括运动学模型和动力学模型
- 运动学模型是一种几何模型,运动学模型是动力学模型的一个子集
- 感知、预测讨论的模型则以运动学模型为主,在控制模块中,更多考虑动力学模型
- 在自动驾驶中,Model以运动学模型(Kinematics model)为初始模型,将环境等参数设置到运动学模型中,把车看作质点进行分析
- 几何模型:
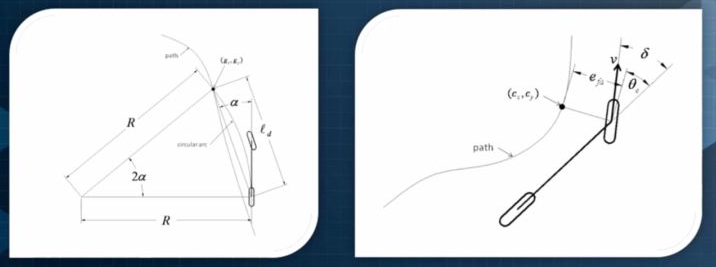
- 综合移动机器人控制模型
- 自行车模型
- 只考虑几何约束是不够的
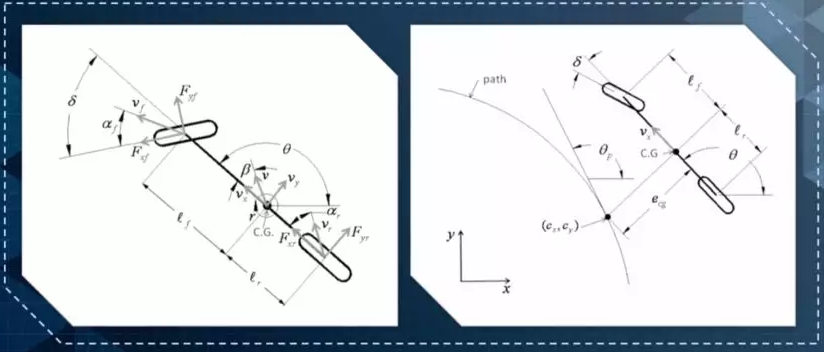
- 上图是一个动力学模型,它不仅考虑了几何约束,还考虑了力矩和扭矩平衡
- 通常情况下,模型的建立是基于误差,而不是参考值
- 在控制器实现过程中,通常会将ODE或者PDE方程进行处理,转化为矩阵计算的形式
系统辨识
- 在模型中,有些参数是未知的,系统辨识的目的是确定这些未知参数的值
- 确定未知参数的方法有三种:
- 白盒方法是指对于基于第一原理(如牛顿定律)的模型结构,可以由测量数据估计模型的参数。
- 灰盒方法是用于只有部分模型结构可知,通过数据重建的方法来获取模型的其它部分的方法。
- 黑盒方法是指模型结构和参数都在未知的情况下,只能通过输入输出数据来估计的方法。
- 基于学习的辨识方法和黑盒方法很类似
控制器设计
- 基于模型的控制模块设计第三步是控制器的设计,包括滤波器设计、控制器设计以及观察器设计等
- 滤波器可以分为线性和非线性,数字滤波或者模拟信号滤波,离散滤波或者连续滤波等
- 系统在频域里面需要满足某些性能要求,滤波器通常也会对频域信号进行处理:根据频域边界,我们可以对滤波器进行进一步细分,包括低通滤波,高通滤波等
- 根据实现方式不同,滤波器又可以分为高斯滤波、卡尔曼滤波、贝叶斯滤波等,这些滤波器通常用于预测和跟踪
参考资料